
 Closed-loop track for T-shaped
LIM
Closed-loop track for T-shaped
LIM 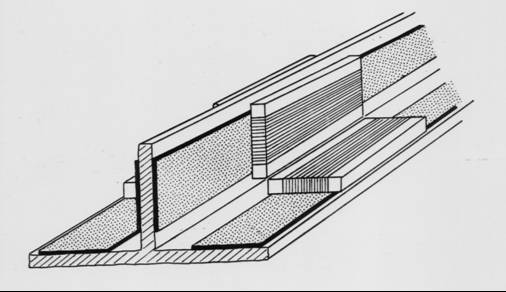
The research concerns the analysis of the vertical dynamics of an electrodynamic levitation system using superconducting coils and a passive damping system. The vertical dynamics of the levitation system is described by the motion equation and the electromagnetic transient equations. In high speed magnetically levitated vehicles, passive damping system usually doesn't provide the required ride quality. Then the damping effect on the mechanical oscillation of the vehicle should be improved by using an additional active damping system. There may be a considerable advantage in using an active system in conjunction with a passive damping system. In the levitation system analysed the two effects are obtained by controlling the current in one of the coils of the damping system.
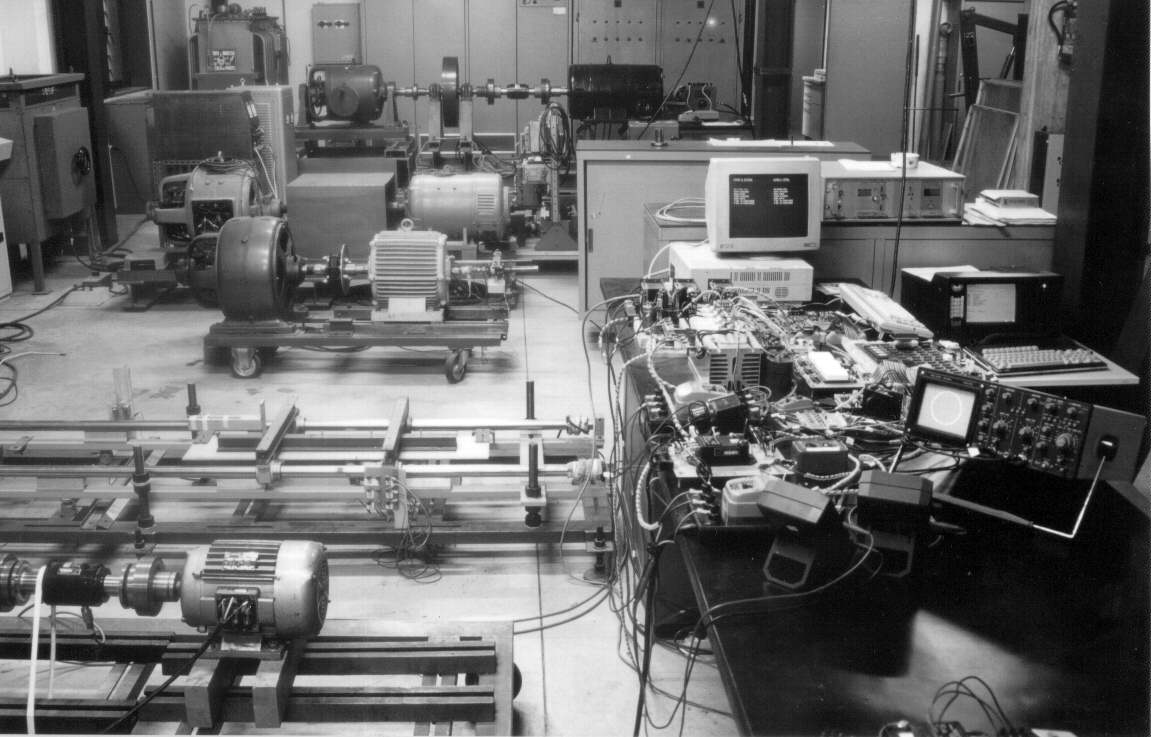 Laboratory view
Laboratory view
The aim of the research is the analysis and the implementation of a
vector control technique for induction motors which utilises stator flux
components as controlled variables. The control strategy needs neither
rotor resistance nor coordinate transformation based on the rotor flux
position, leading to a high performance drive using a simple control scheme. 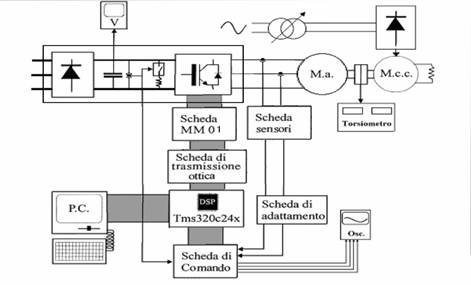 The
method is based on direct control of torque and stator flux. These quantities
can be controlled independently by selecting a proper configuration of
the inverter switches. The selection is made according to the instantaneous
errors in torque and flux. Each selection strategy affects the drive behaviour
in terms of torque and current ripple, switching frequency and regenerative
capability. In addition it should be noted that using some of the possible
switching strategy, undesired flux weakening has been observed. The aim
of this research is to analyse the effects of the different switching strategies
on the behaviour of direct torque control drives.
The
method is based on direct control of torque and stator flux. These quantities
can be controlled independently by selecting a proper configuration of
the inverter switches. The selection is made according to the instantaneous
errors in torque and flux. Each selection strategy affects the drive behaviour
in terms of torque and current ripple, switching frequency and regenerative
capability. In addition it should be noted that using some of the possible
switching strategy, undesired flux weakening has been observed. The aim
of this research is to analyse the effects of the different switching strategies
on the behaviour of direct torque control drives. 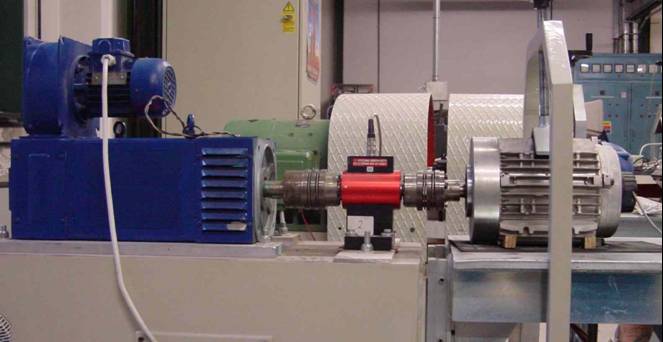
 DC PM linear
motor application
DC PM linear
motor application
The linear actuators are increasingly employed as direct actuators in
servo systems replacing the more conventional mechanical systems. The use
of permanent magnets on the slider offers several advantages associated
with the absence of electrical connections and heating effects due to copper
losses. In addition, the use of a slotless armature results in a simplified
construction. The design of these linear actuators is optimised for maximum
force to total mass ratio and for maximum force to moving mass ratio. In
order to analyse the dynamic behaviour a mathematical model based on a
simplified field analysis is developed. Numerical simulations of the step
response of a positioning servo system are now under investigation.

Places like small islands, natural parks or historical city centers are visited by tourists mainly during the summer season. Until now, several services like shuttle rides and sight-seeing tours are widely performed using Internal Combustion Engine vehicles with a modified body.
ELECTRIC GIC - Technical Specifications
| Chassis | Porter Piaggio |
| Electrical equipment | Micro-Vett S.r.l. |
| Body | Open |
| Seats | 2+4 |
Motor
| Type | 3-phase induction motor - liquid cooled |
| Rated Power | 17,5 kW (23.7 CV) @ 2400 rpm |
| Rated Voltage | 165 V |
| Rated Frequency | 78 Hz |
| Rated Torque | 70 Nm (7,13 Kgm) |
| Max. Speed | 4500 rpm |
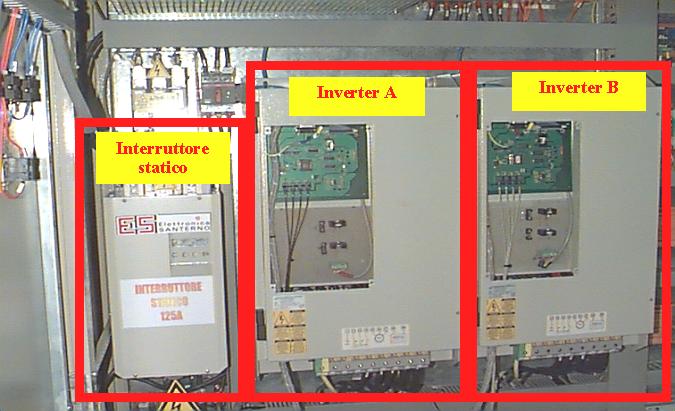
Inverter
| Control Technique | Stator Flux Vector Control (sensorless) |
| Max. Current | 240 A |
| Max. Frequency | 150Hz |
| Batteries | |
| Type | ZEBRA Nickel Sodium Chloride |
| Capacity | 60 Ah |
| Rated Voltage | 296 V |
| Stored Energy | 17,5 KWh |
| Standard Charge | 10 hours |
| Fast Charge | 2 hours |
Performance
| Max speed | 70 Km/h |
| Urban cycle range | 100 Km |
| Max slope | 16 % |
| Plain road acceleration | 1.6 m/s2 |
"VIVI"
Research Project for developing an innovative
electric vehicle for disables which allows an independent way of life.




| Electric Motor | Three-phase Induction Motor SL1 |
| Rated Power | 3800 W |
| Rated Voltage | 56 V |
| Rated Frequency | 70 Hz |
| Pole number | 4 |
| Rated speed | 2000 rpm |
| Maximum speed | 6000 |
| Efficiency | 85% |
| Air-cooled | IP67 |
Back to Home Page of DIE.